HENOK TEGEGN
Robotics engineer passionate about AI, autonomous vehicles, and intelligent systems. Based in Seoul, I’m driven by curiosity and a desire to turn innovative ideas into real-world robotics solutions. Always learning, building, and open to new challenges and collaborations.

Projects
See All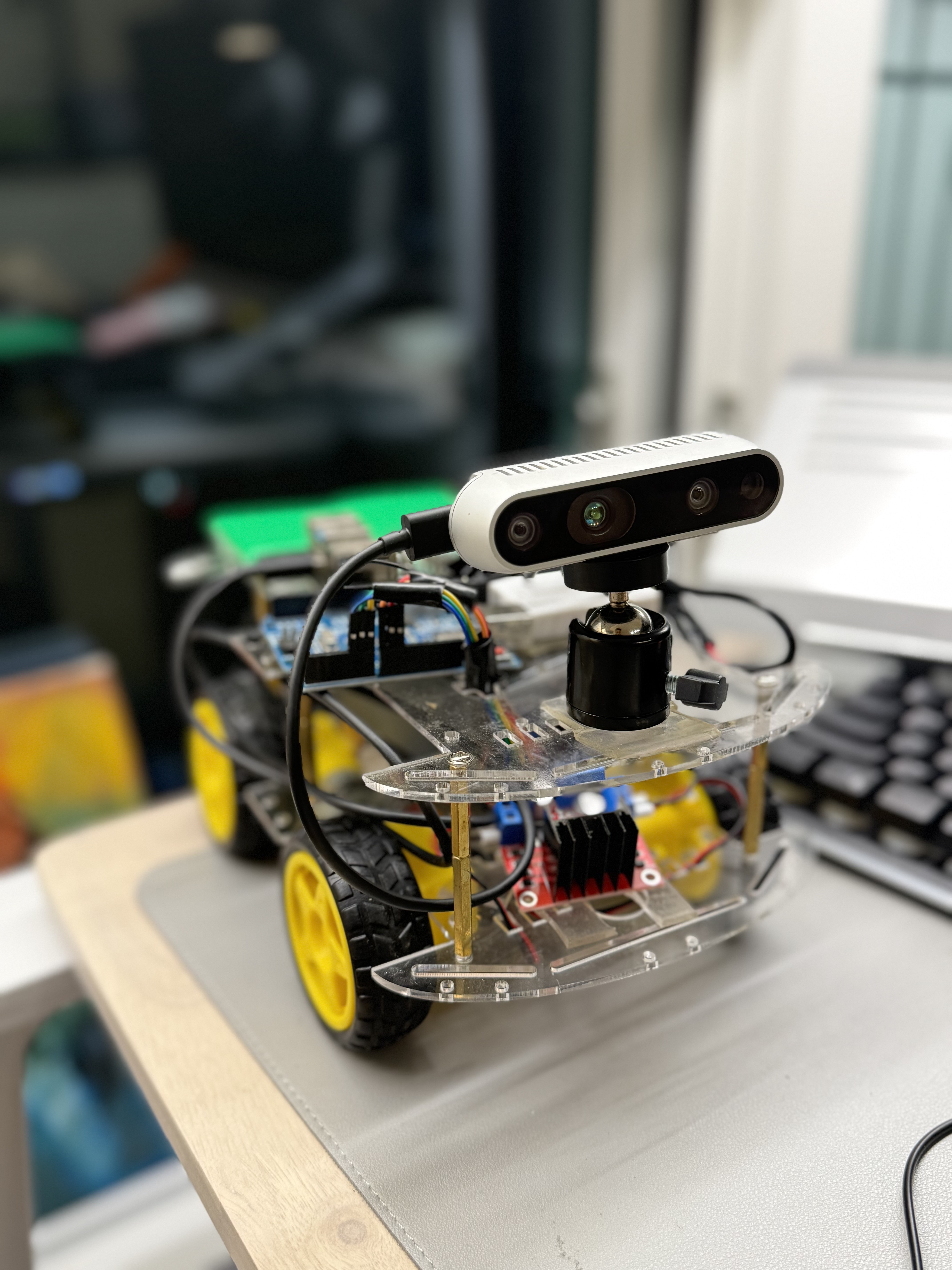
This project aims to build a functional mini autonomous vehicle prototype using affordable hardware components and modular software systems.
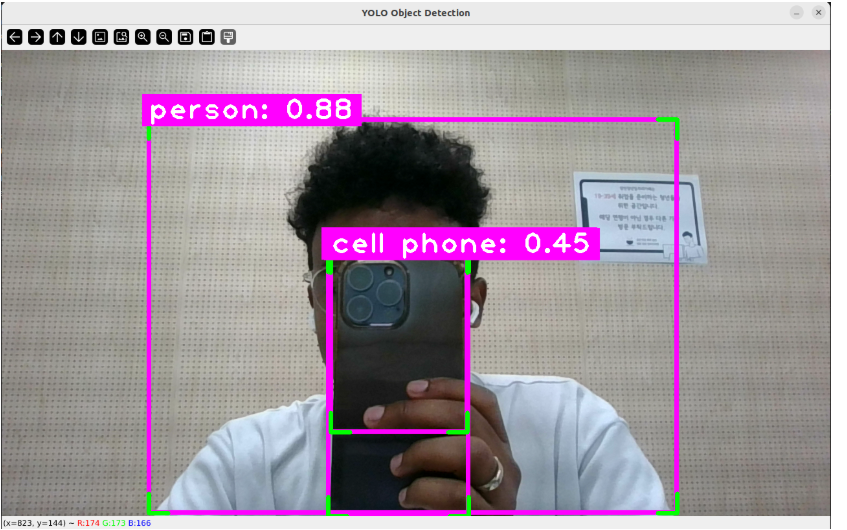
A series of YOLOv8-based projects focused on real-time object detection, from model experiments to webcam integration and advanced counting (cars, people, PPE).The goal is to build a depth-aware detection system using the RealSense D435i, optimized for robotics and real-world deployment.
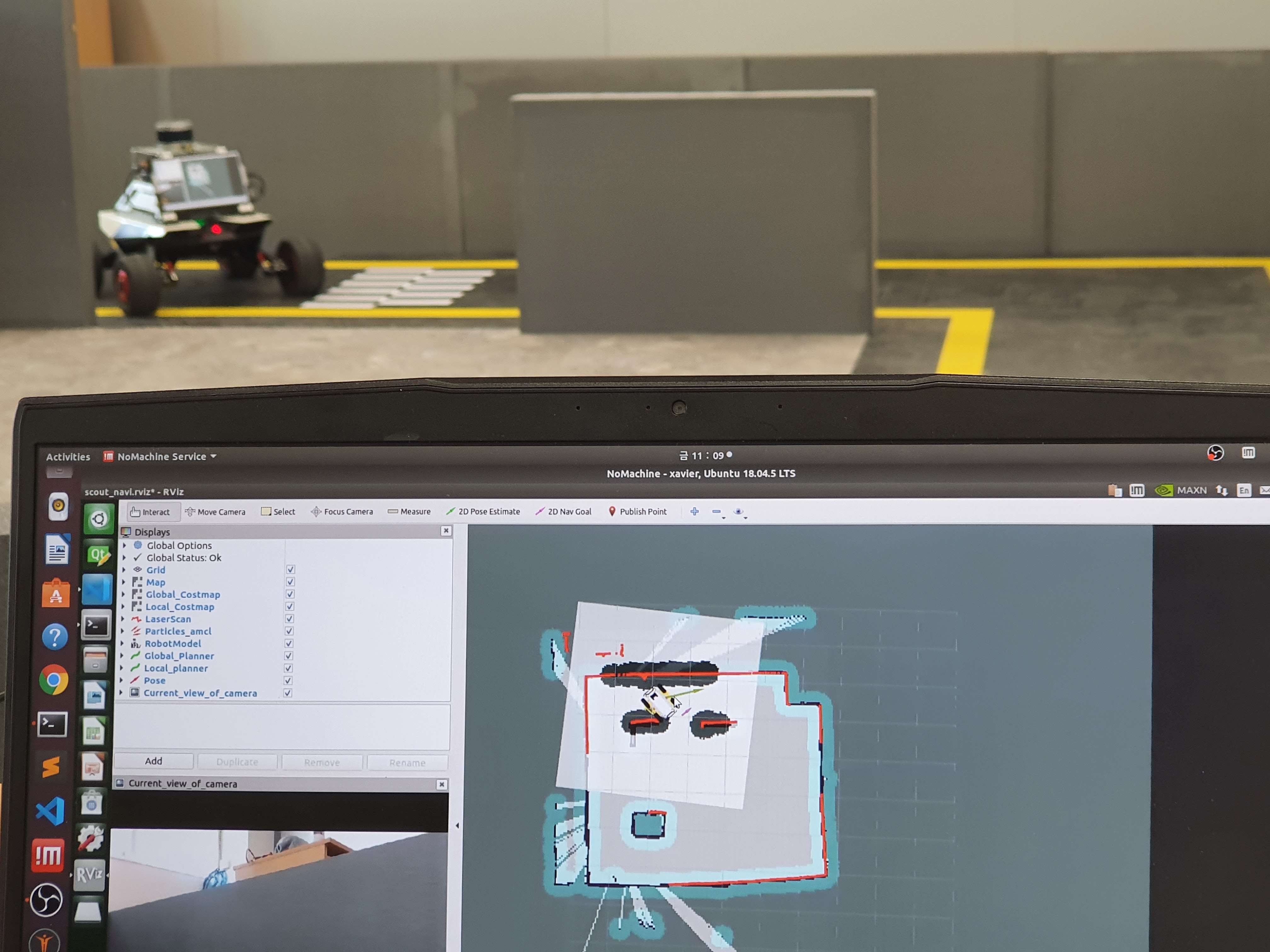
A ROS1 simulation of a self-driving robot with custom URDF, TF setup, motion control (with noise), and Kalman Filter localization.Currently in progress — being prepared for real-world deployment with hardware integration, RealSense, and navigation for dynamic/static obstacles.